
Stephen Hill and Daniel Collin
1. Introduction
With the complexity and interactivity of game worlds on the rise, the need for efficient dynamic visibility is becoming increasingly important.
As luck would have it, this article covers two complementary approaches to visibility determination that have shipped in recent AAA titles across Xbox 360, PS3 and PC: Splinter Cell: Conviction and Battlefield: Bad Company 1 & 2.
These solutions should be of broad interest, since they are capable of handling entirely dynamic environments consisting of a large number of objects, with low overhead, straightforward implementation, and only a modest impact on asset authoring.
But before we describe our approaches in detail, it is important to understand what motivated their development through the lens of existing techniques that are more commonly employed in games.
2. Surveying the Field
Static Potentially Visible Sets (PVSs) is an approach popularised by the Quake engine [Abrash 96] and still in common use today, in part because of its low run-time cost. Put simply, the world is discretised in some way (BSP, grid, etc.) and the binary visibility from each sector (leaf node, cell or cluster respectively) to all other sectors is pre-computed and stored. At run-time, given the current sector containing the camera, determining the set of potentially visible objects becomes a simple matter of retrieving the potentially-visible sectors (and by extension, their associated objects) and performing frustum culling.
One major drawback of using this technique by itself is that any destructible or moving objects (e.g. doors) typically have to be treated as non-occluding from the perspective of visibility determination. This naturally produces over-inclusion – in addition to that coming from sector-to-sector visibility – and can therefore constrain level-design choices in order to avoid pathological situations.
Another disadvantage stems from the fact that a PVS database can be extremely time consuming to pre-compute1, which may in turn disrupt or slow production.
Portals are another approach that can complement or replace static PVS. Here, sectors are connected via convex openings or portals and the view frustum is progressively clipped against them [Möller et al. 08], whilst objects are simultaneously gathered and tested against the active sub-frustum.
Since this clipping happens at runtime, the state of portals can be modified to handle a subset of dynamic changes to the world, such as a door closing or opening. But, even though portals can ameliorate some of the limitations of a static PVS solution, they are still best suited to indoor environments, with corridors, windows and doorways providing natural opportunities to constrain and clip the view frustum.
Anti-portals are a related technique for handling localised or dynamic occlusion where, instead of constraining visibility, convex shapes are used to occlude (cull away) objects behind them with respect to the player. Though they can be effective in open areas, one can only employ a limited number in any given frame for performance reasons. Similarly, occluder fusion – culling from the combined effect of several anti-portals – is typically not viable, due to the much higher cost of inclusion testing against concave volumes.
In recent years, hardware Occlusion Queries (OQs) have become another popular tool for visibility determination [Soininen 08]. The canonical approach involves rendering the depth of a subset (or a simplified representation) of the scene – the occluders – and then rasterising (without depth writes) the bounds of objects, or groups of objects. The associated draw calls are bracketed by a query, which instructs the GPU to count pixels passing the depth test. If a query returns that no pixels passed, then those objects can be skipped in subsequent rendering passes for that camera.
This technique has several advantages over those previously discussed: it is applicable to a wider range of environments, trivially adapts to changes in the world (occluders can even deform) and handles occluder fusion effortlessly, by nature of z-buffer-based testing. In contrast, whilst static PVS and portals can also handle dynamic objects via sector relocation, those same objects cannot act as occluders in general.
3. Query Quandaries
On paper OQs are an attractive proposition, but personal experience has uncovered a number of severe drawbacks, which render them unsuitable for the aforementioned titles. We will now outline these problems one by one.
3.1 Batching
Firstly, though OQs can be batched in the sense being able to issue more than one at a time [Soininen 08] – thereby avoiding lock-step CPU-GPU synchronisation – one cannot batch several bounds into a single draw call with individual query counters. This is a pity, since CPU overhead alone can limit the number of tests to several hundred per frame on current-generation consoles, which may be fine if OQs are used to supplement another visibility approach [Hastings 07], but is less than ideal otherwise.
3.2 Latency
To overcome this limitation, and as a general means of scaling OQs up to large environments, a hierarchy can be employed [Bittner et al. 09]. By grouping, via a Bounding Volume Hierarchy (BVH) or octree for instance, tests can be performed progressively based on parent results, with sets of objects typically rejected earlier.
However, this dependency chain generally implies more CPU-GPU synchronisation within a frame since, at the time of writing, only the CPU can issue queries2. Hiding latency perfectly in this instance can be tricky and may require overlapping query and real rendering work, which implies redundant state changes in addition to a more complicated renderer design.
3.3 Popping
By compromising on correctness, one can opt instead to defer checking the results of OQs until the next frame – so called latent queries [Soininen 08] – which practically eliminates synchronisation penalties, while avoiding the potential added burden of interleaved rendering.
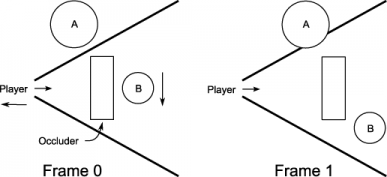
Figure 1: Camera or object movement can lead to popping with latent queries.
Unfortunately, the major downside of this strategy is that it typically leads to objects “popping” due to incorrect visibility classification [Soininen 08]. Figure 1 shows two cases where this can occur. Firstly, the camera tracks back to reveal object A in frame 1, but A was classified as outside of the frustum in frame 0. Secondly, object B moves out from behind an occluder in frame 1 but was previously occluded in frame 0.
Such artifacts can be reduced by extruding object bounding volumes3, similarly padding the view frustum, or even eroding occluders. However, these fixes come with their own processing overhead, which can make eliminating all sources of artifacts practically impossible.
Sudden changes such as camera cuts are also problematic with latent queries, potentially leading to either a visibility or processing spike [Hastings 07] to avoid rampant popping. As such, it may be preferable to simply skip rendering for a frame and only process visibility updates behind the scenes.
3.4 GPU Overhead
The GPU is a precious resource and a common bottleneck in games, as we seek to maximise visual fidelity for a given target frame-rate. Therefore, a visibility solution that relies heavily on GPU processing is less than ideal, particularly on modern consoles where multiple CPU cores or SPUs are available. While it is true to say that OQs should only be issued when there is an overall GPU saving [Soininen 08], this cannot be guaranteed in general and we would ideally like to dedicate as much GPU muscle as possible to direct rendering.
3.5 Variable Costs
A final disadvantage with OQs is that the worst case cost of testing an object is roughly proportional to its size on screen, which typically does not reflect its true rendering cost. While one can, for instance, choose to always render objects with high screen-space coverage to avoid this penalty, it is a less viable strategy when working with a hierarchy.
Even if one develops a more sophisticated oracle [Bittner et al. 09] to normalise performance, this can come at the cost of reduced culling effectiveness. Furthermore, a hierarchy requires additional CPU overhead when objects move, or parts become visible or occluded. As with queries, the per-frame update cost can be bounded by distributing work over multiple frames, but this can similarly compromise culling.
Ideally we would like to avoid these kinds of unfortunate trade-offs, especially when major changes to the environment occur; whilst leveraging coherency can be a great way to reduce the average per-frame processing time, it should not exacerbate worst-case performance!
4. Wish List
Ideally we would like to take the strengths of OQs but reduce or eliminate the negatives.
Here is our wish list:
| In common with OQs | Improvements |
In summary, we would like to be able to handle a wide range of dynamic scenes with the minimum of fuss and no less than great performance. Essentially, we want it all and in the case of Conviction – as you will now learn – we wanted it yesterday!
5. Conviction Solution
One of the initial technical goals of Splinter Cell: Conviction was to support dense environments with plenty of clutter and where, in some situations, only localised occlusion could be exploited.
We initially switched from PVS visibility to OQs because of these requirements, but having battled for a long time with the drawbacks outlined earlier and becoming increasingly frustrated by mounting implementation complexity, hacks and failed workarounds, we started to look for alternatives. Unfortunately, by this point we had a scarce amount of time and resources to dedicate to switching solutions yet again.
Luckily for us, [Shopf et al. 08] provided a guiding light, by demonstrating that the Hierarchical Z Buffer (HZB) [Greene et al. 93] could be implemented efficiently on modern GPUs – albeit via DX10 – as part of an AMD demo. This largely validated that the HZB was a viable option for games, whereas we had previously been skeptical, even with a previous proof of concept by [Décoret 05].
Most importantly, it immediately addressed all of our requirements, particularly with respect to implementation simplicity and bounded performance. In fact, the elegance of this approach cannot be understated, comparing favourably with the illusory simplicity of OQs, but without any of the associated limitations or management complexity in practice.
5.1 The Process
Render Occluder Depth. As with OQs, we first render the depth of a subset of the scene, this time to a render target texture, which will later be used for visibility testing, but in a different way than before.
For Conviction, these occluders were typically artist-authored4 for performance reasons, although any object could be optionally flagged as an occluder by an artist.
Create a Depth Hierarchy. The resulting depth buffer is then used to create a depth hierarchy or z-pyramid, as in [Greene et al. 93]. This step is analogous to generating a MIP-map chain for a texture, but instead of successive, weighted down-sampling from each level to the next, we take the maximum depth of sets of 4 texels to form each new texel, as in Figure 2.
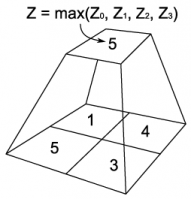
Figure 2: Generating successive levels of the HZB.
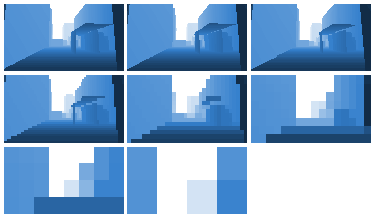
in the distance increasingly dominates at coarser levels.
This step also takes place on the GPU, as a series of quad passes, reading from one level and writing to the next. To simplify the process, we restrict the visibility resolution to a power of two, in order to avoid additional logic of [Shopf et al. 08].
We render at 512x2565 as this seems to strike a good balance between accuracy and speed. This could theoretically result in false occlusion for objects of 2x2 pixels or less at native resolution, but since we contribution-cull small objects anyway, we have not found this to be a problem in practice.
Test Object Bounds. We pack object bounds (world-space AABBs) into a dynamic point-list vertex buffer and issue the tests as a single draw call. For each point, we determine in the vertex shader the screen-space extents of the object by transforming and projecting the bounds. From this, we calculate the finest MIP level of the hierarchy that covers these extents with a fixed number of texels or less and also the minimum, projected depth of the object.
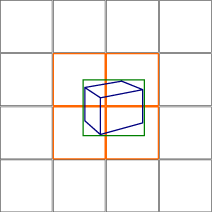
screen extents (green) and overlapping HZB texels (orange).
1OUTPUT main(INPUT input)
2{
3 bool visible = !FrustumCull(input.center, input.extents);
4
5 // Transform/project AABB to screen-space
6 float min_z;
7 float4 sbox;
8 GetScreenBounds(input.center, input.extents, min_z, sbox);
9
10 // Calculate HZB level
11 float4 sbox_vp = sbox*cViewport.xyxy;
12 float2 size = sbox_vp.zw - sbox_vp.xy;
13 float level = ceil(log2(max(size.x, size.y)));
14
15 OUTPUT output;
16 output.pos = input.pos;
17 output.sbox = sbox;
18 output.data = float4(level, min_z, visible, 0);
19 return output;
20}This depth, plus the UVs (sbox: the screen-space AABB) and MIP level for HZB lookup are then passed to the pixel shader. Here we test for visibility by comparing the depth against the overlapping HZB texels and write out 1 or 0 as appropriate.
1sampler2D sHZB : register(s0);
2
3float4 main(INPUT input) : COLOR0
4{
5 float4 sbox = input.sbox;
6 float level = input.data.x;
7 float min_z = input.data.y;
8 bool visible = input.data.z;
9
10 float4 samples;
11 samples.x = tex2Dlod(sHZB, float4(sbox.xy, 0, level)).x;
12 samples.y = tex2Dlod(sHZB, float4(sbox.zy, 0, level)).x;
13 samples.z = tex2Dlod(sHZB, float4(sbox.xw, 0, level)).x;
14 samples.w = tex2Dlod(sHZB, float4(sbox.zw, 0, level)).x;
15
16 // Modulate culling with depth test result
17 float max_z = max4(samples);
18 visible *= min_z <= max_z;
19
20 return visible;
21}In practice, we chose to use 4x4 HZB depth comparisons in contrast to the simpler example code above, as this balanced ALU instructions and texture lookups on Xbox 360.
Another thing to note is that we perform world-space frustum testing and screen-bound generation separately. While the two can be combined as in [Blinn 96], we found that we got better code generation this way and could add extra planes to the frustum test when processing reflections.
It is also possible to improve upon the MIP level selection for situations when an object covers less texels (see Listing 3).
1// Texel footprint for the lower (finer-grained) level
2float level_lower = max(level - 1, 0);
3float2 scale = exp2(-level_lower);
4float2 a = floor(sbox_vp.xy*scale);
5float2 b = ceil(sbox_vp.zw*scale);
6float2 dims = b - a;
7
8// Use the lower level if we only touch <= 2 texels in both dimensions
9if (dims.x <= 2 && dims.y <= 2)
10 level = level_lower;Process the results. Finally, the results are read back to the CPU via memexport on Xbox 360. On PC, under DX9, we instead emulate DX10 stream-out by rendering with a point size of 1 to an off-screen render-target, followed by a copy to system memory via GetRenderTargetData.
5.2 Tradeoffs
By using a fixed number of lookups in place of rasterisation, the performance of the visibility tests is highly predictable for a given number of objects. That said, this bounded performance comes at the cost of reduced accuracy for objects that are large on screen.
However, an alternative way to view this approach is that it is probabilistic: large objects are on average more likely to be visible anyway, so performing more work (in the form of rasterisation with OQs) is counter-productive. Instead, with HZB testing, accuracy is distributed proportionally. This proved to be a particularly good fit for us, given that we wanted a lot of relatively small clutter objects, where instancing was not appropriate for various reasons.
We also benefited from the high granularity afforded by a query per object, whereas wholly OQ-based methods require some degree of aggregation in order be efficient (as we already argued), leading to reduced accuracy and more variable performance. This showed up in our own analysis when switching to HZB visibility from OQs. We started off with a 2x2 depth-test configuration and even that out-performed hand-placed occlusion query volumes, both in terms of performance and the amount of culling. Essentially, what we lost in terms of occlusion accuracy, we gained back from being able to test objects individually.
Point rendering with a vertex buffer was primarily chosen for ease of development as vertex buffers offered the convenience of heterogeneous data structures. However, a more efficient option could be to render a single quad and fetch object information from one or more textures instead. Not only would this ensure better pixel-quad utilisation on some hardware, but it would also play to the strength of GPUs with a non-unified shader architecture such as the PS3’s RSX, where the bulk of the shader hardware is dedicated to pixel processing.
5.3 Performance
Table 1 represents typical numbers seen in PIX on Xbox 360, for a single camera with around 22000 objects, all of which are processed each frame.
| Pass | Time (ms) |
| Occlusion | 0.06 |
| Resolve | 0.04 |
| HZB Generation | 0.10 |
| HZB Queries | 0.32 |
| Total | 0.52 |
5.4 Extensions
Once you have a system like this in place, it becomes easy to piggy-back related work that could otherwise take up significant CPU time compared to the GPU, which barely breaks a sweat. Contribution fading/culling, texture streaming and LOD selection, for instance, can all be determined based on screen extents or similar6, with results returned in additional bits.
On Xbox 360, we can also bin objects into multiple tiles ourselves, thereby avoiding the added complexity and restrictions that come with using the Predicated Tiling API, not to mention the extra latency and memory overhead when double-buffering the command buffer.
Finally, there is no reason for limiting visibility processing to meshes. We also test and cull lights, particle systems, Ambient Occlusion volumes [Hill 10] and dynamic decals.
5.5 Shadow Caster Culling
Later in development, we extended our system to accelerate shadow map rendering, with a two-pass technique initially inspired by [Lloyd et al. 04], but a lot more straightforward. For instance, we do not slice up the view frustum and test sub-regions as they do. This is mostly because we are not using shadow volumes for rendering and therefore not aiming to minimise fill-rate7, only the number of casters – for CPU and vertex transform savings. Development time and ease of GPU implementation were also factors.
In the first pass, we test caster visibility from the light’s point of view, in exactly the same way that we do for a regular camera: via another HZB. If a given caster is not visible, it is culled as before. If it is visible, we write out the active shaft bounds, which are formed from the 2D light-space extents, the caster’s minimum depth, and the maximum depth from the HZB:
1float3 shaft_min = float3(input.sbox.xy, min_z)
2float3 shaft_max = float3(input.sbox.zw, max_z)Figure 5 shows this in action for a parallel light source. Here, caster C is fully behind an occluder8, so it can be culled away as it will not contribute to the shadow map.
In the second pass, we transform these shafts into camera space and test their visibility from the player’s point of view via the existing player camera HZB – again just like regular objects. Here, as the shafts of A and B have been clamped to the occluder underneath, they are not visible either.
Conceptually, we are exploiting the redundancy of shadow volume overlap across two viewpoints in order to reduce our set of potential casters.
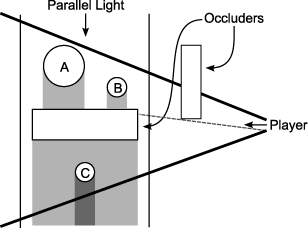
Figure 5: Two-pass shadow visibility.
5.6 Summary
To reiterate, this entire process takes place as a series of GPU passes; the CPU is only involved in dispatching the draw calls and processing the results at the end.
In retrospect, a CPU solution could have also worked well as an alternative, but we found the small amount of extra GPU processing to be well within our budget. Additionally, we were able to leverage fixed-function rasterisation hardware, stream processing and a mature HLSL compiler, all with literally man-years of optimisation effort behind them. In contrast to the simple shaders listed earlier, a hand-optimised VMX software rasteriser would have taken significantly longer to develop and would have been harder to extend.
If you already have a PVS or portal visibility system, then there can still be significant benefits to performing HZB processing as an additional step. For one thing, either system can act as an initial high-level cull, thus reducing the number of HZB queries. In the case of portals, the “narrow-phase” sub-frusta testing could also be shifted to the GPU. Indeed, from our own experience, moving basic frustum testing to the GPU alone was a significant performance win over VMX tests on the CPU. Finally, in the case of BSP-based PVS, the faces could be pre-converted to a number of large-scale occluders for direct rendering.
6. Battlefield Solution
When developing the first game (Battlefield: Bad Company) with our new in-house Frostbite engine, we knew that we needed a solution for removing objects occluded by others. We discussed many methods, but it all came down to a list of things that we wanted the system to have:
- Must be fully dynamic, since the environment – both objects and terrain – can deform
- Low GPU overhead
- Results accessible from the CPU, so we can skip updating certain aspects of occluded objects, such as animation
After reading about Warhawk’s solution [Woodard 07] based around software rasterisation on SPUs, we decided to try a similar approach as we had spare processing power available on the CPU side. The resulting implementation was subsequently rolled out across all of our target platforms (Playstation 3, Xbox 360 and PC), but we will focus in particular on the details of the PS3 version.
At a high-level, the steps involved are very similar to those of Conviction: a software occlusion rasteriser renders low polygon meshes to a z-buffer, which occludees are then tested against to determine if they are visible or not.
In reality, the work is broken down into a number of stages, which are job-scheduled in turn across several SPUs. We will now describe these in detail.
6.1 The Process
Occluder Triangle Setup. This stage goes through all occluders in the world (a flat array) in preparation for rasterisation:
- Each job grabs a mesh from the array using InterlockedIncrement.
- The job checks if the mesh is inside the frustum. If it is not, it continues to the next one (step 1).
- If the mesh is fully inside the frustum, its triangles are immediately appended to an output array (also interlocked and shared between the jobs).
- If the mesh was not fully inside, its triangles are clipped before being added.
Terrain Triangle Setup. This is effectively the same as the previous stage, except that it generates and adds conservative triangles for the terrain9 to the array.
Occluder Render. This is the stage that actually rasterises the triangles. Each SPU job has its own z-buffer (256 x 114) and grabs 16 triangles at a time from the triangle array generated previously.
When the jobs are finished getting triangles from the triangle array, they will each try to lock a shared mutex. The first one will simply DMA its z-buffer to main memory, unlock the mutex and exit so that the next job can start running.
As the mutex gets unlocked, the next job will now merge its own buffer with the one in main memory and send back the result, and so on. (Note: There are several ways to improve on this and make it faster. We could, for example, DMA directly from each SPU.)
Frustum Cull. This stage performs frustum versus sphere/bounding box (BB) checks on all meshes in the world – typically between 10,000 and 15,000 – and builds an array for the next stage. The implementation traverses a tree of spheres (prebuilt by our pipeline) and at each leaf we do bounding-box testing if the sphere is not fully inside.
Occlusion Cull. Finally, this is where visibility testing against the z-buffer happens. We firstly project the bounding-box of the mesh to screen-space and calculate its 2D area. If this is smaller than a certain value – determined on a per mesh basis – it will be immediately discarded (i.e, contribution culled).
Then, for the actual test against the z-buffer, we take the minimum distance from the camera to the bounding-box and compare it against the z-buffer over the whole screen-space rectangle. This falls somewhere in between the approach of [Woodard 07] – which actually rasterises occludees – and that of Conviction in terms of accuracy.
6.2 Performance
These timings reflect best-case parallelism over 5 SPUs and were measured in a typical scene. In practice, workloads between SPU jobs will vary slightly and may be intermixed with other jobs, so the overall time for visibility processing will be higher.
In this case we rasterised around 6000 occluder triangles (we normally observe 3000 to 5000), and performed around 3000 occlusion tests after frustum and extent culling.
| Stage | Time/SPU (ms) |
| Triangle Setup | 0.4 |
| Rasterisation | 1.0 |
| Frustum Cull | 0.6 |
| Occlusion Cull | 0.3 |
| Total | 2.3 |
7. Future Development
7.1 Tools
Although artist-authored occluders are generally a good idea for performance reasons (particularly so with a software rasteriser), we encountered a couple of notable problems with this strategy on Conviction. Firstly, with a large team and therefore a number of people making changes to a particular map, there were a few cases where modifications to the layout of visual meshes would not be applied to the associated occluders. Even with the blueprint of a map largely locked down, cosmetic changes sometimes introduced significant errors and these tended to show up right at the end of testing when production was most stretched!
Secondly, some artists had a tendency to think of modelling occluders in the same way as collision meshes – when, in fact, occluders should always be flush with or inside of the visual meshes they represent – or they did not feel that a small inaccuracy would be that important. This simply was not the case: time and again, testers would uncover these problems, particularly in scope mode where the reduced field of view can magnify these subtle differences up to half of the screen, causing large chunks of the world to disappear.
These errors would also show up as “shadow acne” due to the requirement that shadow occluders – those used for culling casters during shadow map visibility – had to cast shadows themselves. Sometimes, it would have made more sense to have just used these visual meshes directly as occluders, instead of creating separate occluder meshes.
While checks can be added in the editor to uncover a lot of these issues, another option could be to automatically weld together, simplify and chunk up existing visual meshes flagged by artists.
At the root of it all, the primary concern is correctness; there is no such thing as “pretty looking” visibility, so one could argue that it is not the best use of an artist’s time to be modelling occluders if we can generate them automatically for the most part, particularly if a human element can introduce errors. This is definitely something we would like to put to the test going forward.
7.2 Optimisations
One trivial optimisation for the GPU solution would be to add a pre-pass, testing a coarse subdivision of the scene (e.g. regular grid) to perform an earlier, high-level cull – just like in Battlefield, but using the occlusion system too. We chose not do this as performance was already within our budget, but it would certainly allow the approach to scale up to larger environments (e.g. “open world”).
Additionally, a less accurate object-level pre-pass – for instance, 4 HZB samples using the bounding sphere, as with [Shopf et al. 08] – could lead to a speed-up wherever there is a reasonable amount of occlusion (which by necessity is a common case). Equally, a finer-grained final pass (e.g. 8x8 HZB samples) could improve culling of larger occluders.
In a similar vein, another easy win for the SPU version would be using a hierarchical z-buffer either for early rejection or as a replacement for a complete loop over the screen bounds. As earlier numbers showed, however, the main hotspot performance-wise is occluder rasterisation. In that instance we might gain again, this time from hierarchical rasterisation as in [Abrash 09], although at the cost of increased implementation complexity. Frustum culling could also be sped up by switching to a different data structure (e.g. grid) to improve load balancing on SPUs as well as memory access patterns.
Although the accuracy versus performance trade-off from the HZB was almost always beneficial for Conviction, we did encounter a couple of instances where we could have profited from better culling of large, structural geometry. We believe that the biggest factor here was the lack of varying z over the occludee (see Figure 6) when testing against the HZB, not the number of tests (beyond 4x4) or the base resolution.

can lead to conservative acceptance in some cases.
On Xbox 360, we investigated directly hardware-rasterising occludee bounds as a proof-of-concept for overcoming this, but we ran out of time and there were some performance pitfalls with memory export. We hope to pick up where we left off in future.
Conviction’s shadow caster culling proved to be a significant optimisation for cascaded shadow maps. One potential avenue of future development would be to try to adapt the idea of frustum subdivision coupled with caster-receiver intersection testing, as presented in [Diamand 10], with similarities to [Lloyd et al. 04]. [Eisemann and Décoret 05] and [Décoret 05] also build on the latter.
We would also like to extend culling to local shadow lights in future. As we already cache10 casters per shadow light, we could directly evaluate shadow-visibility for this subset of the scene. This would avoid the higher fixed overhead of processing all objects in the map as we do for the main view or shadow cascades, which is important since we can have up to 8 active shadow lights per camera. These updates could either happen every frame or whenever the list changes.
7.3 Future Hardware
The jury is out on exactly what sort of future we face when it comes to the convergence of increasingly multi-core CPUs and more programmable GPUs and when, or indeed if, it will happen. Larrabee is an interesting example, showing that even fixed-function rasterisation hardware is potentially on the way out [Abrash 09] and while a CPU solution could be considered a safe long-term bet, the most efficient method going forward may be closer to the way hardware works than a traditional scan-line approach.
[Andersson 10] describes two possible future scenarios for visibility processing: either a progression of the GPU approach we already described but with lower latency, or having the ability for the GPU to feed itself commands. A killer application for the latter could be shadow map rendering, where visibility (as earlier) and subsequent draw calls would happen entirely on the GPU, thereby avoiding any CPU synchronisation, processing and dispatch. This is almost possible today and potentially so on current consoles, but existing APIs are a roadblock.
7.4 General
In Conviction, although arbitrary occlusion tests could be issued by the main thread – to accelerate other systems, in much the same way as Battlefield – we had to restrict their use in the end due to the need for deterministic behavior during co-operative play. This was primarily an issue for PC as we could not ensure matching results between GPUs from different IHVs, or indeed across generations from the same vendor. For the next title, we hope to find other applications for exploiting our system where this is not a problem.
Were we to generate a min-max depth hierarchy, we could also return more information about the state of occlusion, which may open up more applications. By testing the z-range of objects, we can determine one or more states: completely visible or occluded (all tests pass conclusively), partially occluded (tests pass conclusively as fully visible or occluded), potentially occluded (some tests are inclusive: i.e. z-range overlap with the HZB).
8. Conclusion
Whatever the future, experimenting with solutions like these is a good investment; in our experience, we gained significantly from employing these fast yet straightforward visibility systems, both in development and production terms.
The GPU implementation in particular is trivial to add – demonstrated by the fact that our initial version was developed and integrated in a matter of days – and comes with a very reasonable overhead.
9. Acknowledgements
We would like to thank Don Williamson, Steven Tovey, Nick Darnell, Christian Desautels, and Brian Karis for their insightful feedback or correspondence, as well as the authors of all cited papers and presentations for considerable inspiration.
10. References
[Abrash 96] Michael Abrash, “Inside Quake: Visible-Surface Determination”. In Dr. Dobb’s Sourcebook, January/February 1996.
[Abrash 09] Michael Abrash. “Rasterization on Larrabee”. Game Deveoper’s Conference, 2009.
[Andersson 10] Johan Andersson. “Parallel Futures of a Game Engine v2.0”. STHLM Game Developer Forum, 2010.
[Blinn 96] Jim Blinn. “Calculating Screen Coverage”. In IEEE CG&A, v16:3, 1996.
[Bittner et al. 09] Jiří Bittner, Oliver Mattausch, and Michael Wimmer. “Game Engine Friendly Occlusion Culling”. In ShaderX^7, Charles River Media, 2009.
[Diamand 10] Ben Diamand. “Shadows In God of War III”. Game Developer’s Conference, 2010.
[Décoret 05] Xavier Décoret. “N-Buffers for efficient depth map query”. Eurographics, 2005.
[Eisemann and Décoret 05] Elmar Eisemann and Xavier Décoret. “Fast Scene Voxelization and Applications”. ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, 2006.
[Greene et al. 93] Ned Greene, Michael Kass, and Gavin Miller. “Hierarchical Z-buffer Visibility”. SIGGRAPH, 1993.
[Hastings 07] Al Hastings. “Occlusion Systems”, 2007.
[Hill 10] Stephen Hill. “Rendering with Conviction”. Game Developer’s Conference, 2010.
[Lloyd et al. 04] Brandon Lloyd, Jeremy Wendt, Naga Govindaraju, and Dinesh Manocha. “CC Shadow Volumes”. Eurographics Symposium on Rendering (EGSR), 2004.
[Möller et al. 08] Tomas Akenine-Möller, Eric Haines, and Naty Hoffman, “Real-Time Rendering”, 3rd Edition. AK Peters, 2008.
[Redon et al. 02] Stephane Redon, Abderrahmane Kheddar, and Sabine Coquillart. “Fast Continuous Collision Detection between Rigid Bodies”. Eurographics 2002.
[Shopf et al. 08] Jeremy Shopf, Joshua Barczak, Christopher Oat, and Natalya Tatarchuk. “March of the Froblins: Simulation and Rendering Massive Crowds of Intelligent and Detailed Creatures on GPU”. SIGGRAPH 2008 Classes.
[Soininen 08] Teppo Soininen. “Visibility Optimization for Games”. Gamefest 2008.
[Woodard 07] Bruce Woodard. “SPU Occlusion Culling”. SCEA PS3 Graphics Seminar, 2007.
-
Of the order of 10 hours in some cases [Hastings 07]. ↩︎
-
Predicated rendering is one indirect and limited alternative on Xbox 360. ↩︎
-
A more accurate extrusion should take into account rotational as well as spatial velocity, as with continuous collision detection [Redon et al. 02]. ↩︎
-
These are often a simplified version of the union of several adjoining, structural meshes. ↩︎
-
This is approximately a quarter of the resolution of our main camera in single player mode. ↩︎
-
We choose to use the object’s bounding sphere for rotational invariance. ↩︎
-
But we could adapt this type of testing to cull more. See Section 7, Future Development. ↩︎
-
Occluders used for shadow culling always cast shadows. ↩︎
-
As the terrain can deform, these must be regenerated. ↩︎
-
The cache is updated on object or light movement. ↩︎